FOG-TM50型光纤陀螺仪
1. 产品简介
1.1 产品的工作原理、功能和适用范围
本产品是一种基于Sagnac原理的惯性角速率传感器,用于测量载体绕产品敏感轴的角速率。本产品以光纤环为角速率敏感单元,通过闭环检测电路,把光纤环敏感的角速率引起的相位差,通过干涉的方式转变为强度信号,检测电路将强度信号再转化为电压信号,并通过调制解调将该信号检测出来,然后将其作为反馈信号反馈回光路中,从而实现闭环控制。 本产品是由光学系统及相应供电和数据处理电路构成的惯性传感器,可提供单轴角速率信息,用于高精度惯导系统和定位定向系统的惯性测量组件中。 本产品目前状态是正常量产,且可以转让全套生产线。
1.2 产品组成
产品主要由下述部组件等组成:
- 光路组件:包括光纤环、Y波导、耦合器、SLED光源、PIN-FET探测器;
- 光源驱动电路,检测与控制信号电路板;
- 光纤环骨架及屏蔽腔、外罩、上盖和底板。
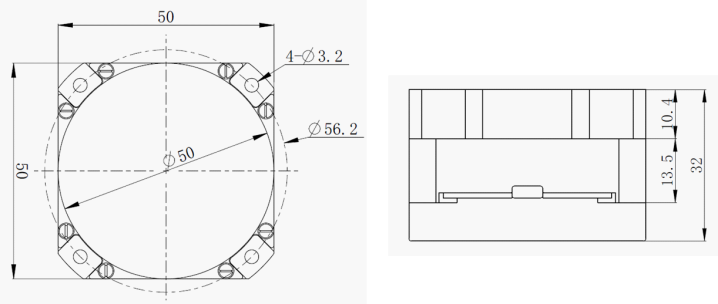
1.3 外形及安装尺寸
外形尺寸(50±0.1)mm × (50±0.1)mm × (32±0.5)mm,
安装尺寸(56.2±0.1)mm × (56.2±0.1)mm。
1.4 重量
170g±10g。
1.5 工作温度
-40℃~+70℃。
1.6 存储温度
-55℃~+70℃。
1.7 耐随机振动
随机振动量级:6.06g,频率范围:20Hz~ 20000Hz。
1.8 主要性能参数
| 序号 | 项目 | 性能指标 | 备注 |
|---|---|---|---|
| 1 | 量程(°/s) | ±470 | 可选 |
| 2 | 标度因数(LSB/°/s) | 2000000×(1±10% ) | 可选 |
| 3 | 常温标度因数非线性度、不对称性(ppm) | ≤50 | |
| 4 | 常温标度因数重复性(ppm) | ≤50 | |
| 5 | 全温标度因数重复性(ppm) | ≤100 | |
| 6 | 零偏(°/h) | ≤1 | 扣除地速 |
| 7 | 常温零偏稳定性(10s,1σ,°/h) | ≤0.1 | 非补偿 |
| 8 | 常温零偏重复性(1σ,°/h) | ≤0.1 | 非补偿 |
| 9 | 随机游走(°/√h) | ≤0.01 | |
| 10 | 启动时间(min) | 0 | |
| 11 | 振动中与振动前、后偏值变化(°/h) | ≤0.2 | |
| 12 | 振动前后偏值变化(°/h) | ≤0.2 | |
| 13 | 耐低气压高度(m) | 10000 | |
| 14 | 磁场敏感度(°/h/Gs) | ≤0.010 |
1.9 机械、电气接口
1.9.1 机械接口
产品安装面构成对外安装的固定面,安装螺钉为M5。
1.9.2 电源要求
外部提供给产品的电源有两路,要求如表2所示
| +5V | -5V | |
|---|---|---|
| 电压 | 5.0V~5.4V | -4.8V~-5.4V |
| 纹波 | 20mV | 20mV |
| 最大电流 | 1.2A | 0.2A |
1.9.3 电气接口
FOG-TM98采用J30-21TJ-L=300mm插座与外部进行电气连接(相应对插接头采用J30-21ZK),接插件定义见表3,接插件定义可以按照客户要求做修改。每次连接或接触该产品的插头端子时,应采取防静电措施。
| 电连接器点号 | 电气定义 | 备注说明 |
|---|---|---|
| 1, 12, 7, 17 | 主板+5V | 陀螺供电 |
| 6, 16, 13, 14 | 主板±5V地 | 陀螺供电 |
| 4, 15 | 陀螺供电 | 陀螺供电 |
| 3, 5 | NC | 备用,无连接(Not Connected) |
| 8, 18 | T+ | RS422发信号的+端 |
| 9, 19 | T- | RS422发信号的-端 |
| 10, 20 | R+ | RS422收信号的+端 |
| 11, 21 | R- | RS422收信号的-端 |
1.9.4 通讯协议
产品测量的角速率信号以RS422串口外触发模式输出,波特率460800bps,数据更新率2.5ms。数据格式:
- a) 每字节数据为11位,包括:第1位为起始位(0),第2~9位为数据位,第10位为偶校验位,第11位为停止位;
- b) 一帧数据包括陀螺输出和温度输出两部分,其中陀螺有效数据为32位,温度有效数据为12位(最高位为符号位,0为正,1为负);
| 高位(bit7) | (bit6) | (bit5) | (bit4) | (bit3) | (bit2) | (bit1) | 低位(bit0) | |
|---|---|---|---|---|---|---|---|---|
| 陀螺帧头(第零字节): | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 第一字节: | 0 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| 第二字节: | 0 | D13 | D12 | D11 | D10 | D9 | D8 | D7 |
| 第三字节: | 0 | D20 | D19 | D18 | D17 | D16 | D15 | D14 |
| 第四字节: | 0 | D27 | D26 | D25 | D24 | D23 | D22 | D21 |
| 第五字节: | 0 | 0 | 0 | 0 | D31 | D30 | D29 | D28 |
| 第六字节: | 0 | X | X | X | X | X | X | X |
| 第六字节: | 注:第六字节为校验字节,是数据包内第一字节至第五字节数据的XOR值。 | |||||||
| 第七字节: | 0 | T-D6 | T-D5 | T-D4 | T-D3 | T-D2 | T-D1 | T-D0 |
| 第八字节: | 0 | T-D13 | T-D12 | T-D11 | T-D10 | T-D9 | T-D8 | T-D7 |
| 第九字节: | 0 | T-X | T-X | T-X | T-X | T-X | T-X | T-X |
| 第九字节: | 注:第九字节为校验字节,是数据包内第七字节至第八字节数据的XOR值。 | |||||||